Presentación año 2026 de ITC Robotic
Conoce a fondo nuestras capacidades de integración, el catálogo técnico de ecosistemas cuadrúpedos de DEEP Robotics y soluciones de automatización industrial para terreno.
Línea de Producción Autónoma
Robots cuadrúpedos y robots humanoides configurados para la industria, investigación y seguridad perimetral.

M20SOPORTA:
Inspección, investigación, seguridad, rescate, topografía, cartografía, entre otros.
PDF M20 S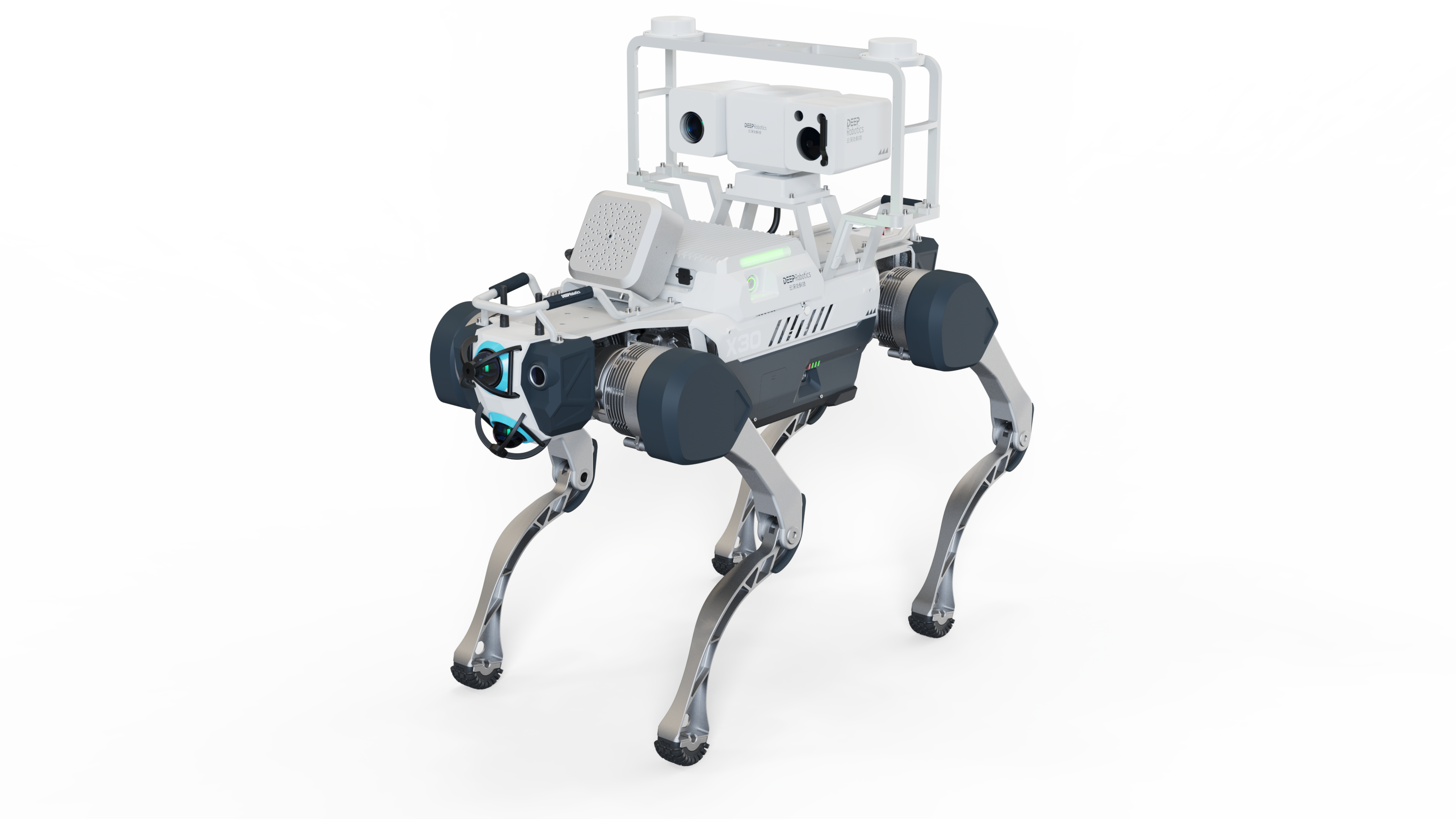
X30SOPORTA:
Inspección, investigación, seguridad, rescate, topografía, cartografía, entre otros.
PDF X30 Pro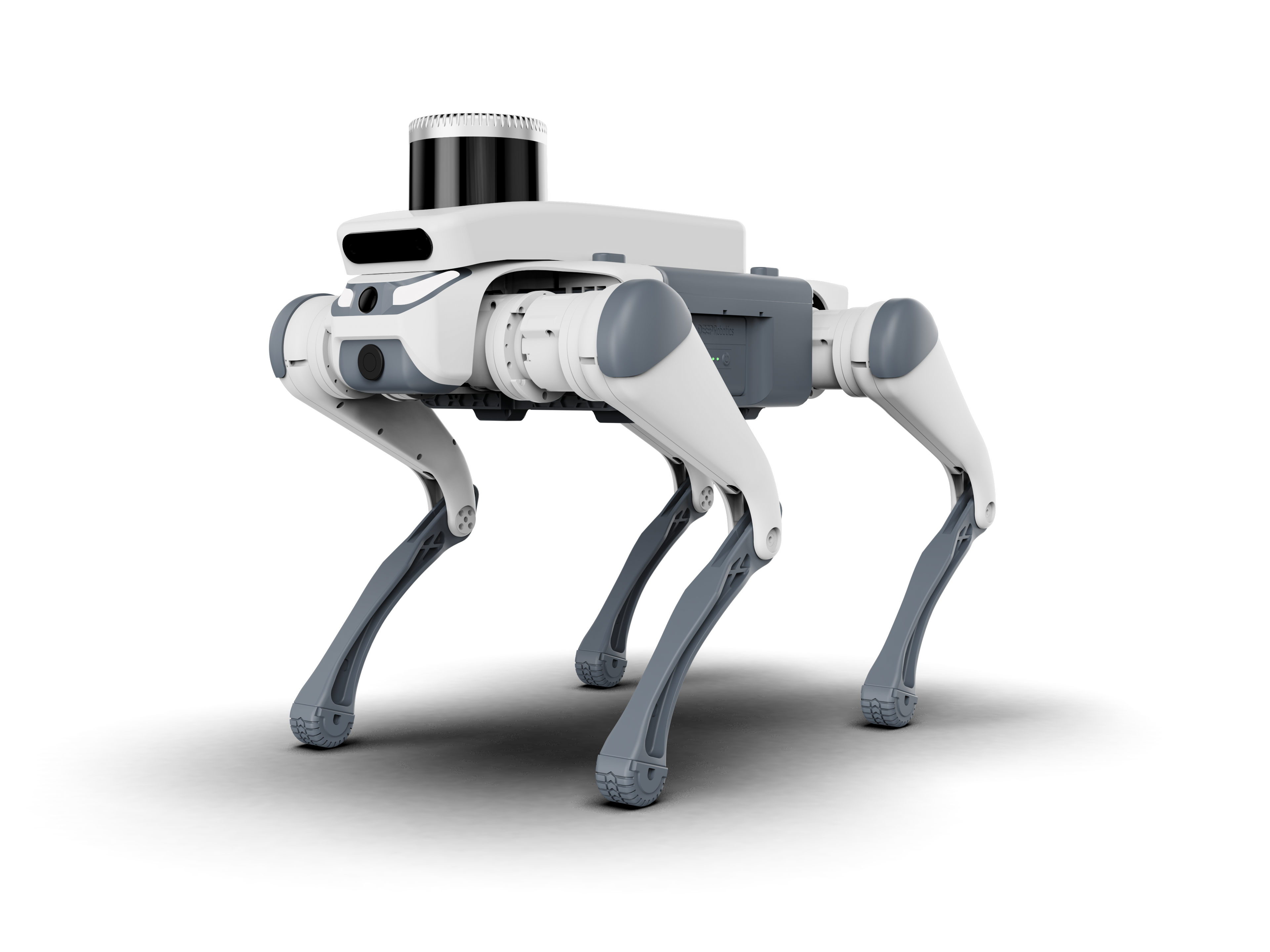

Entorno de Desarrollo e I+D
Accede a los SDKs oficiales, librerías en C++ / Python y herramientas de simulación en ROS/ROS2 para la integración de sensores y algoritmos.
developer@itcrobotic:~$ git clone https://github.com/DeepRoboticsLab/deeprobotics_sdk.git
Cloning into 'deeprobotics_sdk'...
remote: Enumerating objects: 100%, done.
developer@itcrobotic:~$ colcon build --symlink-install
[0.452s] Starting >>> deeprobotics_telemetry
[2.814s] Finished <<< deeprobotics_telemetry [2.36s]
[SUCCESS] All 3 packages compiled successfully.
developer@itcrobotic:~$ ros2 launch deeprobotics_bringup robot.launch.py
[INFO] [robot_node]: Connecting to EtherCAT master at eth0...
[INFO] [robot_node]: Quadruped hardware structure: READY
[ONLINE] Standby loop active. Awaiting motion commands...
DeepRobotics SDK Motor
Ecosistema nativo para la comunicación directa con el controlador maestro a través del bus CAN. Permite la habilitación y deshabilitación de motores en tiempo real y el envío dinámico de parámetros de control. Incluye módulos base en la carpeta de ejemplos para el control de una sola articulación (single_motor) y de múltiples articulaciones en paralelo (multi_motor).
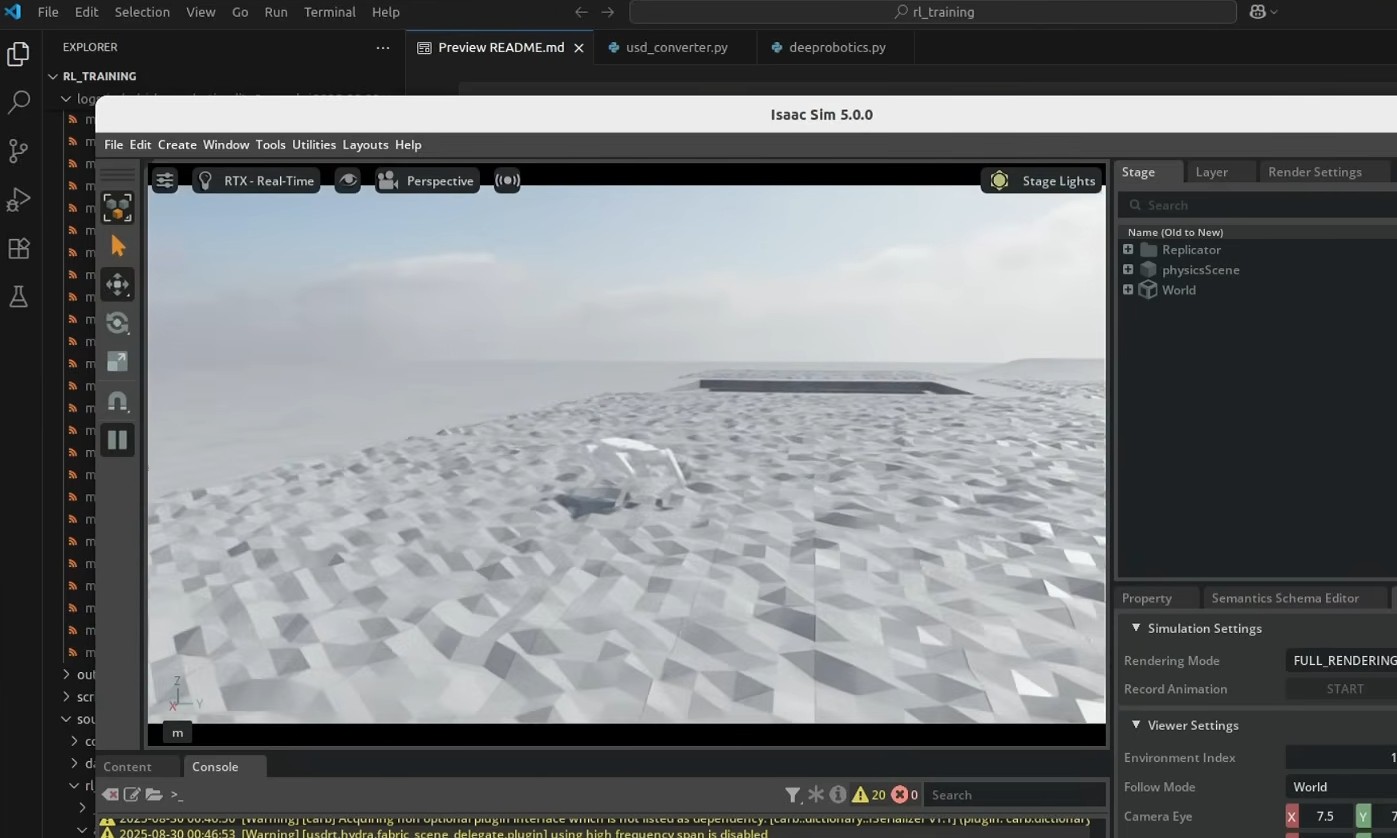
Integración ROS 2 & Isaac Lab
Ecosistema oficial para el Sistema Operativo de Robots y entrenamiento por aprendizaje por refuerzo. Desarrolla mapas de elevación con sensores LiDAR y navegación autónoma.
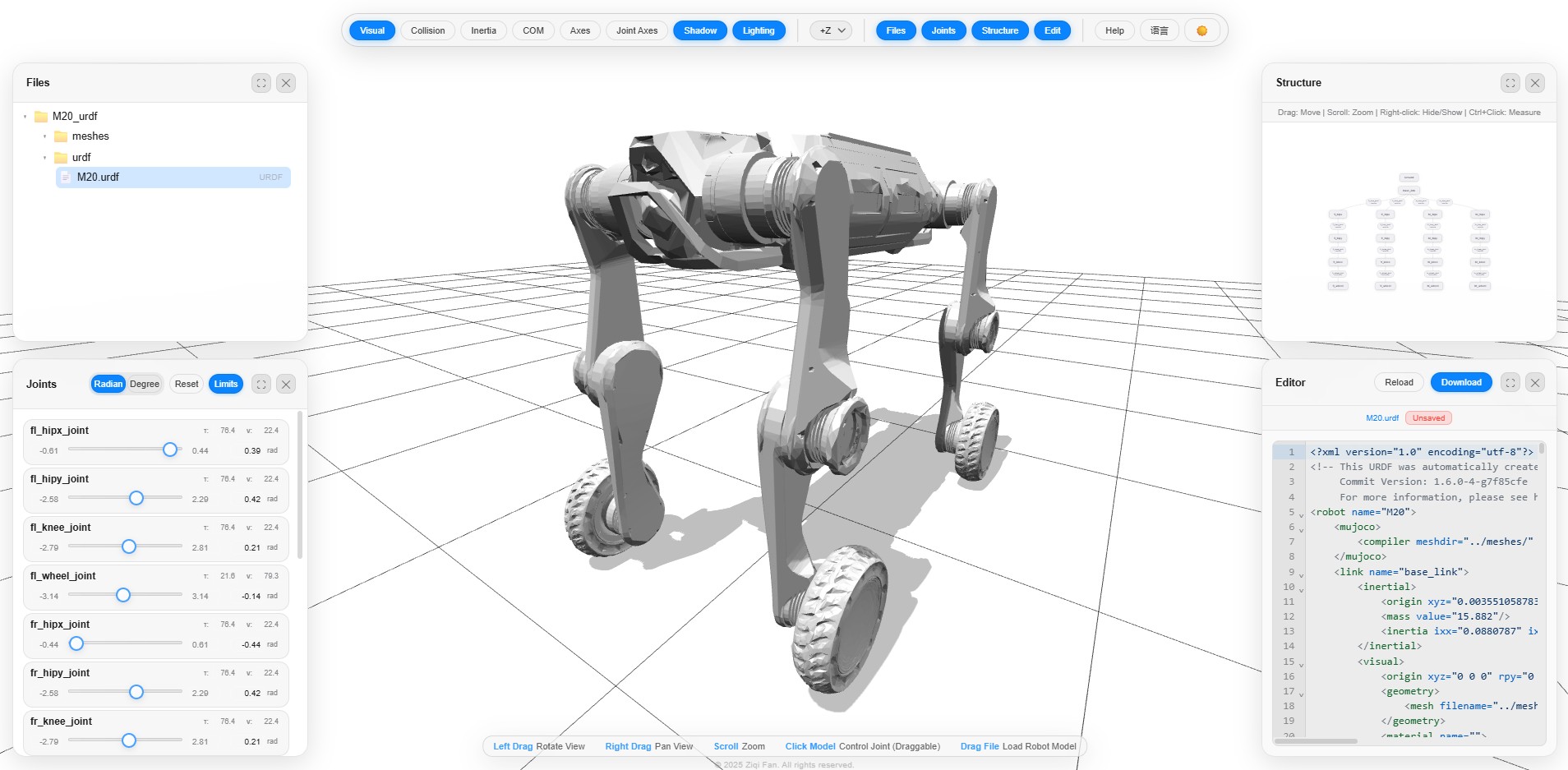
Ir al RepositorioModelos 3D y Actuadores Virtuales
Repositorio central con los modelos tridimensionales oficiales para seis plataformas de Deep Robotics: Lite3, M20, X30, M20_Piper, DR02 Pro y DR02 Standard. Cada unidad está disponible en formatos de alta fidelidad MJCF, URDF y USD. Para la inspección de mallas y toma de medidas precisas, se incluye acceso al visualizador web interactivo mediante arrastre directo de directorios.
Robots en Entornos de Simulación
Visualización de las plataformas de Deep Robotics ejecutando pruebas de física computacional, aprendizaje por refuerzo y mapeo autónomo antes de su despliegue en terreno.
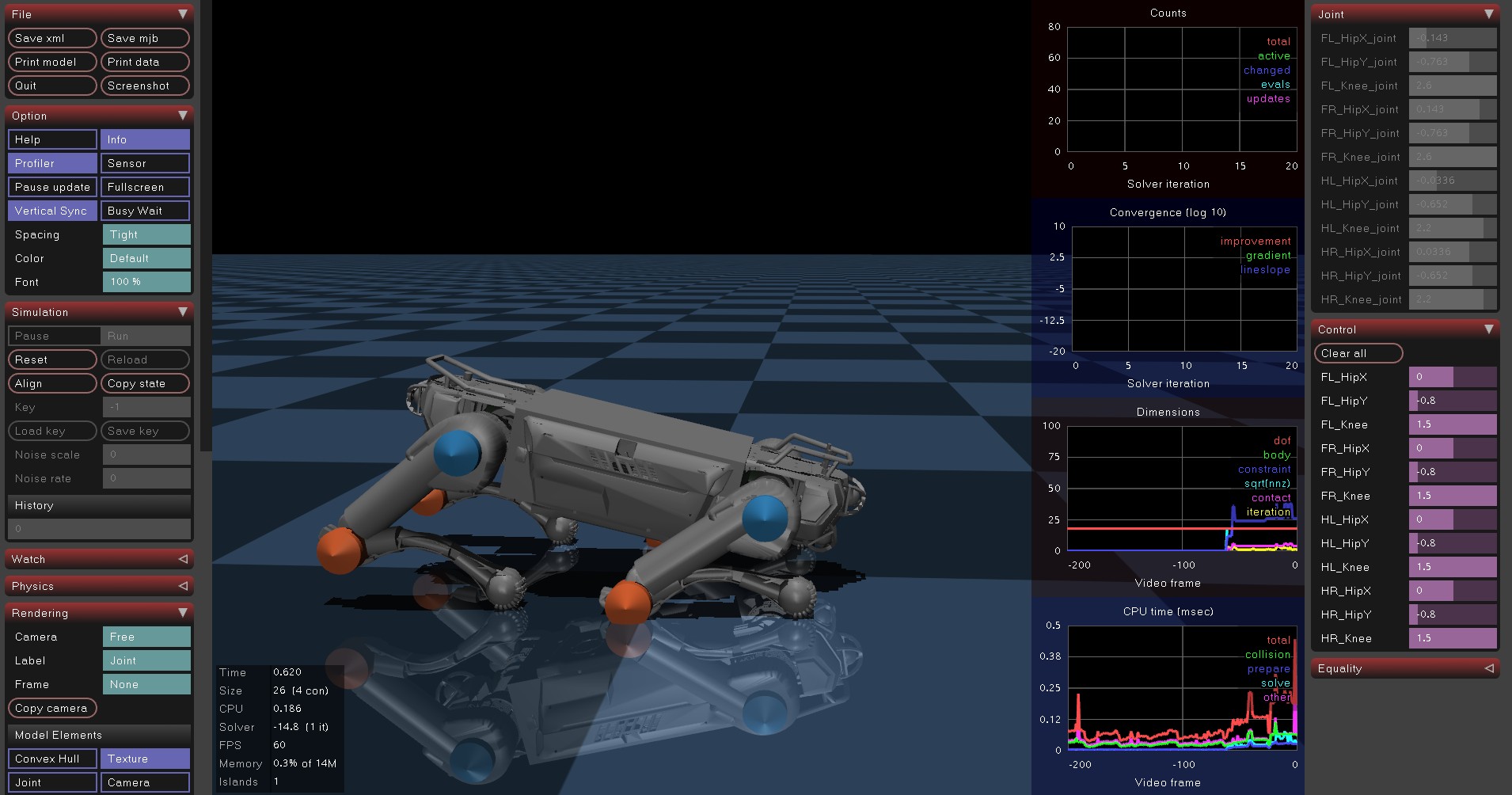
Evaluación de dinámica de fluidos y contacto, validación cinemática en entornos de física computacional y análisis de torque en los actuadores de cada articulación.
Simulación de dinámicas de contacto de alta fidelidad para el sistema híbrido de patas y ruedas.
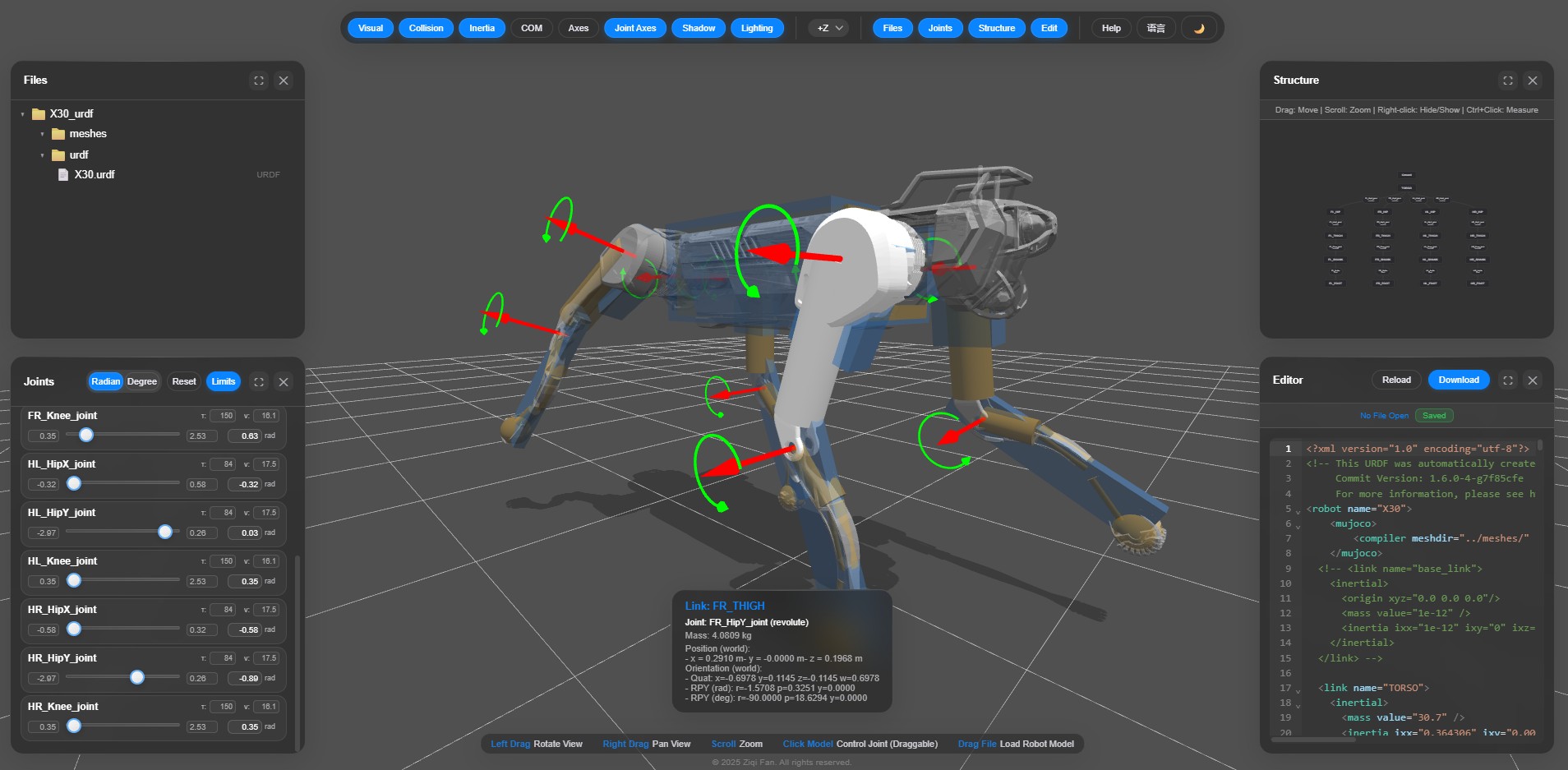
Inspección de mallas tridimensionales y verificación de rangos, límites angulares y vectores de rotación en los actuadores de las extremidades.
Control omnidireccional en entornos hostiles, entrenamiento predictivo por IA y sistemas automáticos de mitigación de impactos y auto-recuperación (reincorporación autónoma).